Conception de géotextiles pour la construction de routes revêtues - Méthode Semmmeijer
Utilisation de géotextiles
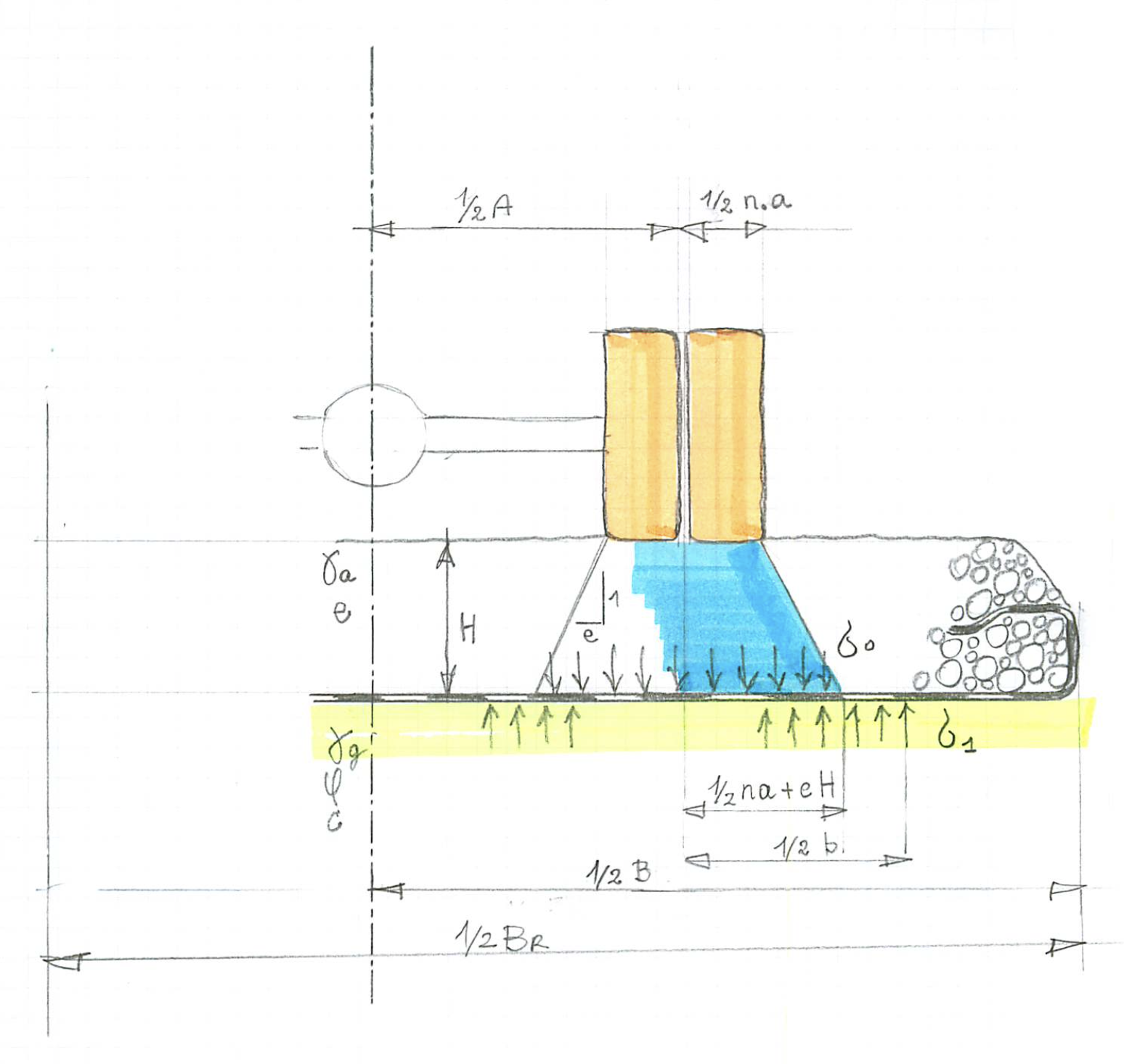
Il est intéressant d’utiliser des géotextiles pour la construction de routes lorsque la capacité portante du sous-sol est insuffisante et que la charge de circulation risque de provoquer un effondrement d’une partie de la route. Un géotextile permettra de répartir la charge sur une plus grande surface du sous-sol et d’assurer ainsi un équilibre. Le croquis explique ce principe. La charge par essieu se transmet à la route par la pression exercée par les roues du véhicule. Cette force se répand dans le granulat et jusqu’aux bords du géotextile. Ce dernier doit être conçu de manière que cette dernière pression puisse être supportée par la capacité portante du sous-sol.
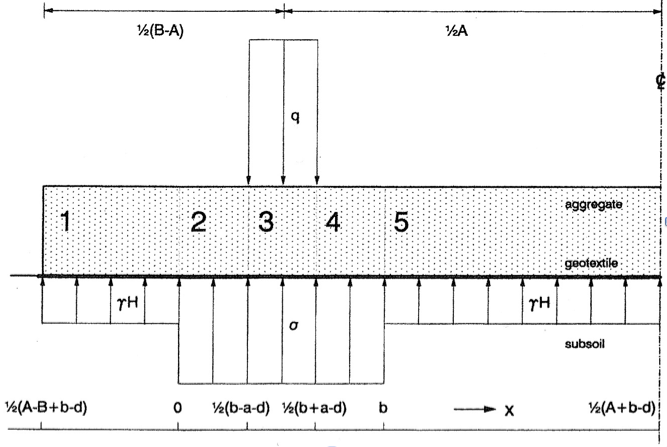
Fig. 1: Charge par essieu – pressions et dimensions – coupe transversale d’une route à faible volume
Efficacité des géotextiles
L’utilisation de géotextiles de renforcement dans des structures routières est comparable à celle de barres d’acier dans le béton armé. Le géotextile permet d’ajouter des contraintes de tension dans le système, ce que le granulat ne permet pas d’obtenir à lui seul. Les géotextiles peuvent s’utiliser de deux manières différentes, connues dans la littérature spécialisée sous les appellations « Lateral Restraint » (confinement latéral) et « Membrane Action » (effet de membrane). L’analogie avec le béton armé est la plus grande dans le premier cas. Les avantages et les inconvénients de la méthode du confinement latéral sont les suivants:
- La déformation de la route est faible, ce qui rend possible son revêtement
- Le véhicule peut changer de position latéralement; il n’est pas cantonné à une voie fixe.
- L’amélioration de la capacité portante du système est limitée étant donné la rigidité relativement faible du géotextile et les contraintes de tension limitées qui y sont associées.
L’utilisation du géotextile exploitant l’effet de membrane permet d’accroître beaucoup plus la capacité portante. Les avantages et les inconvénients de cette méthode sont les suivants:
- Le granulat subit une déformation importante et il est préférable de ne pas mettre un revêtement rigide.
- Les véhicules doivent rouler toujours dans les mêmes traces parce que la forme du géotextile est conçue pour fournir un maximum de contraintes de tension.
- L’amélioration de la capacité portante n’est plus limitée par la rigidité du géotextile, mais bien par sa résistance, ce qui est beaucoup plus efficace.
- Le géotextile doit être bien ancré de part et d’autre de la route.
Confinement latéral
Le confinement latéral se calcule sur la base de l’interaction entre le granulat et le géotextile qui a pour effet de créer un équilibre entre la charge par essieu et la capacité portante du sous-sol. Il s’agit du système communément appelé système SGA (Sol-Géotextile-Agrégat). Nous allons à présent expliciter le calcul et en illustrer les résultats. Pour la publication originale, voir Semmmeijer 1990.
La répartition des pressions est schématisée dans la figure 2. Le granulat et le géotextile s’échangent une contrainte normale p et une contrainte de cisaillement p tanΦ , Φ étant l’angle de frottement entre le granulat et le géotextile. Le granulat subit une contrainte provenant du poids du sol γa ainsi que la contrainte de surface q et il subit une déformation correspondant à un angle α . Sur les faces agissent une force normale N et un cisaillement T. Le géotextile est étiré par une force de tension S tandis que le sous-sol réagit par une pression normale σ limitée par sa capacité portante, et une contrainte de cisaillement c + σ tanϕ où c désigne l’adhésion et ϕ l’angle de frottement, tous deux entre le sous-sol et le granulat. Pour des raisons de simplicité, nous considérons que l’adhésion est égale à la cohésion du sous-sol.
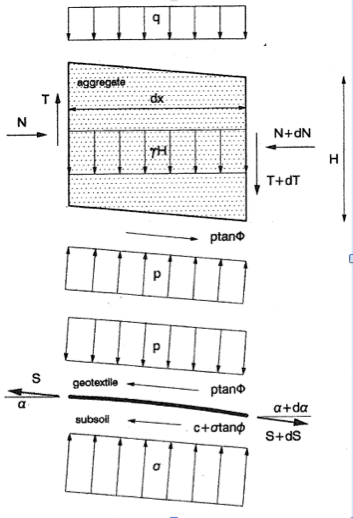
Fig.2: Contraintes sur l’élément routier
La condition d’équilibre tant horizontal que vertical pour le granulat comme pour le géotextile donne une série d’équations différentielles. Pour le granulat:

Pour le géotextile, les conditions deviennent:

Cette série peut être reformulée en triant les dérivées par rapport à S et α :

L’équilibre ne suffit cependant pas à lui seul pour déterminer la mécanique du système. Il faut aussi inclure la compatibilité, y compris le comportement constitutif. Si G est le module de cisaillement du granulat, qui dépend des contraintes isotrope et déviatoire, la relation entre la force et déformation de cisaillement est,

À ce stade, on dispose de suffisamment d’informations pour dériver le système d’équations. La première équation du (01) et la formule du (04) permettent de définir la contrainte p. Ce résultat est substitué dans la formule (03) et donne deux équations qui décrivent la force de traction et la déflexion du géotextile. De plus, la substitution de p dans la deuxième équation du (01) spécifie la force normale N. Le résultat est retranscrit en passant par plusieurs étapes intermédiaires:
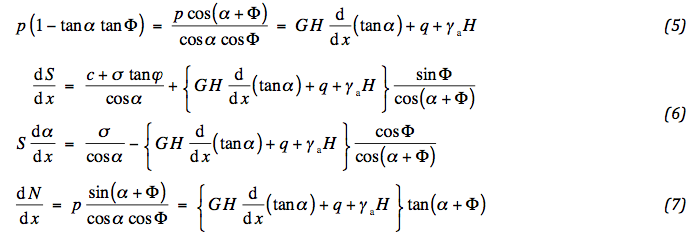
La force de traction et la déflexion sont définis par la formule (06); avec la formule (07), elles décrivent la force normale. Jusqu’à ce stade, la modélisation est très générale. Le moment est donc venu d’adapter la solution au cas particulier des faibles déflexions; les formules (06) et (07) deviennent:

En général, lorsqu’il s’agit d’une déformation modérée à faible, le paramètre GH l’emporte sur la force de traction S, de sorte que l’on obtient la série suivante d’équations découplées:

Ces équations montrent que la rigidité du granulat compense les déflections, mais que la force de traction dans le géotextile contribue à la stabilité en activant une force normale dans le granulat, qui maintient la friction mobilisée sous le niveau critique. La phase de modélisation est maintenant terminée, bien que tous les incunnues n’aient pas encore été bien spécifiés. Les concepts de friction mobilisée et de déformation du géotextile seront explicités lors de la solution des équations dérivées.
Conception
Le modèle peut être appliqué à la situation décrite dans la figure 1. B est la largeur effective de la route; A est la bande occupée par le véhicule; a est la largeur de la pression q; b est la largeur de la capacité portante σ et résulte de l’équilibre vertical du sous-sol: b ( σ - γαH ) = a.q. Si le granulat ou la bande sont trop faibles, la réaction du sol se déplace, ce que décrit le paramètre d. La situation se présente comme suit,

Comme la figure 1 le montre, on peut distinguer 5 sections présentant des conditions de pression différentes. Les sections 1 et 5 ne présentent aucune déflection, étant donné que la réaction du sol compense le poids mort du granulat. Les sections 2 et 4 présentent une déflection convexe due à la pression σ – γαH; tandis que dans la section 3 la déflexion est concave à cause de la pression q – σ – γαH . Cette répartition peut s’inférer de la deuxième équation du (09).
Nous allons maintenant détailler la procédure permettant d’arriver à la solution. La déflection est déterminée par la deuxième équation du (09). Si l’on y associe la formule (04), l’on obtient la force de cisaillement force T. Les déplacements verticaux peuvent également être calculés. Ils dépendent purement des paramètres du sol et sont un critère pour la spécification du géotextile requis.
Le géotextile a pour rôle de contenir la friction mobilisée. La deuxième équation du (09) permet de déterminer la trajectoire de la force normale, celle-ci étant à son tour utilisée comme condition de limite pour fixer la force de traction dans le géotextile, qui est définie par la première équation du (09). La limite est soit le point où la force normale est déterminée par la compatibilité, soit le bord du granulat lui-même. Une fois que l’on connait la force de traction, la condition de compatibilité entre la tension du géotextile et le granulat donne un critère permettant de déterminer le module de Young du géotextile. La conception du géotextile comprend donc la spécification de la rigidité et de la résistance requises.
L’intégration de la troisième équation du (09) pour déterminer la déformation va d’elle-même. Les sections 1 et 5 ne présentent aucune déflection. Les autres sections présentent chacune des déflections linéaires qui sont continues aux endroits de transition. Les déflections maximales apparaissent à la transition entre les sections 2 et 3 et à celle entre les sections 3 et 4. Si on les substitue dans l’équation (04), on obtient les forces maximales de cisaillement suivantes,

Comme dw/dx = tan α, on peut déterminer les déplacements verticaux w. Ceux-ci sont chacun quadratiques dans les sections. La différence de déplacement entre les endroits situés sous la roue et soit au bord, soit au milieu du granulat, est donc,

xm est la position sous la roue, où le déplacement atteint son maximum. Pour une hauteur H pas trop fine, le déplacement vertical est faible. Comme il apparaîtra plus tard, cette propriété intéressante est liée à la qualité du géotextile à mettre en œuvre.
La prochaine étape du calcul concerne la force normale dans le granulat, qui est déterminée au moyen de la deuxième équation du (09). Il est à noter que la direction de la contrainte de cisaillement à droite du x = xm est opposée par rapport de celle située du côté gauche. Cela veut dire que pour x > xm, il faut ajouter un signe moins. La contrainte au cisaillement ne peut se développer qu’à la condition qu’un déplacement suffisant soit possible. Comme il est douteux que cela soit le cas sous les roues, l’on peut raisonnablement supposer qu’il n’y a pas de contraintes de cisaillement significatives à cet endroit. Si la force normale maximale est représentée par Nm, l’on obtient les expressions suivantes,
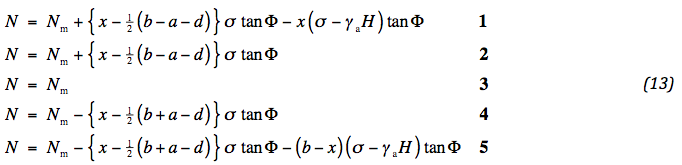
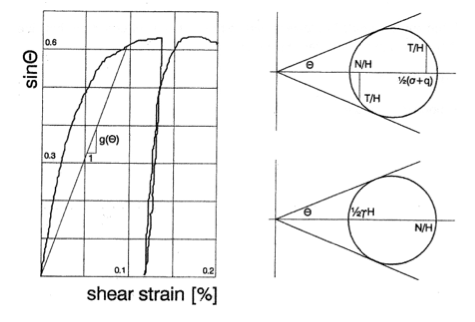
Fig. 3: Friction mobilisée
Les numéros en gras correspondent aux sections. La valeur de Nm est fonction de la friction mobilisée. Cette dernière correspond au ratio entre la contrainte déviatoire et la contrainte isotrope. Il y a deux points où l’on attend des valeurs extrêmes: les bords de la roue et les bords de la réaction du sous-sol. Dans le premier cas, la friction mobilisée se caractérise par une contrainte verticale moyenne ½ ( σ + q ), une contrainte horizontale Nm / H et une contrainte de cisaillement Tm / H, tandis que dans le second cas, elle se caractérise par une contrainte verticale moyenne ½ γa H et une contrainte horizontale { Nm – ½ ( b - a ± d ) σ tan Φ }. Sur la base de cercles de Mohr de la Fig. 3, l’on obtient: :

Une expression de Nm s’obtient en écrivant Nm explicitement et par substitution du (11). Le θ élevé est critique, ce qui nécessite d’appliquer la valeur absolue de d. L’on obtient l’alternative suivante: :

La conception doit faire en sorte que la deuxième valeur du (15), qui correspond au bord de la réaction du sous-sol, soit supérieure à celle qui correspond au bord de la roue. C’est la seule manière pour que l’une des deux valeurs du (15) conduise à la friction mobilisée maximale visée au (14). Il s’ensuit que pour la valeur de θ, le choix doit se porter sur une valeur suffisamment élevée. L’on notera que la friction mobilisée ne peut en aucun cas avoir une valeur supérieure à celle de la friction interne du granulat. C’est pourquoi la charge q ne peut être illimitée et qu’il convient parfois de la réduire pour prévenir l’«action de membrane» ou même des perforations.
Si la première valeur de la formule du (15) est inférieure à la seconde, c’est très important car cela implique que le bord de la roue est en situation critique. En effet, la force normale joue un rôle passif et elle cherche donc la valeur la plus faible possible. Une condition capitale est imposée par le discriminant du (15). La formule se lit comme suit:

Cette condition exprime que le lissage maximum de la réaction du sous-sol est proportionnel à la hauteur du granulat et qu’une conception basée sur d ≠ 0 est moins favorable. Des valeurs extrêmes de d auront pour effet d’annihiler la fonction de dalle du granulat, provoquant ainsi des perforations et des déformations importantes.
Même en l’absence de véhicule, il y a déjà une force normale qui agit dans le granulat à cause du poids mort. Cette force est désignée par N0 et sera spécifiée plus tard. Il est possible que la valeur de N sur les côtés descendent en dessous de N0, auquel cas l’action du géotextile s’arrête à partir de là. Cela implique qu’il faut réduire la largeur de la route. Après un moment, il en va de même pour la force de traction dans le géotextile. Cela concerne le milieu de la route. Nous nous concentrons ici sur les côtés.
La réduction de la largeur active résulte de la valeur de la force normale sur le côté ½ (A ‑ B + b - d) de la section 1 (voir Fig. 1). Au besoin, la largeur B – A peut simplement être réduite. Il résulte de (13) que:

La valeur de la force normale sur le bord est:

Ceci achève la seconde phase du calcul. L’attention se focalise à présent sur le géotextile. La force de traction sur le bord compense la force normale dans le granulat sur le côté lorsque B est faible ou elle disparaît lorsque l’on applique N0. La force de traction est déterminée au moyen de la première équation (09). La remarque relative à la direction de la friction qui avait été formulée à propos de la force normale s’applique également ici. À droite de x = xm, il faut appliquer un signe moins dans l’équation différentielle. De plus, aucune contrainte de cisaillement n’est à l’œuvre directement sous les roues. Le résultat après intégration est le suivant:
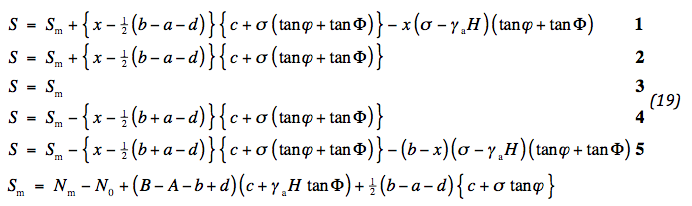
Il se peut que S disparaisse avant d’atteindre la moitié de la bande. L’on peut alors appliquer le même remède mathématique que précédemment, en diminuant cette fois la bande A :

Avec la formule (17), cette adaptation définit des nouvelles valeurs pour A et B,les valeurs originales étant représentées en gras. Il pourrait être nécessaire d’ajuster une nouvelle valeur pour d conformément à (10), ce qui nécessite une procédure itérative. La dernière phase du calcul concerne la compatibilité de tension. Juste sous les roues, le granulat est supposé être dans un état plastique. Le granulat est donc poussé vers les côtés, provoquant un étirement du géotextile. L’élongation du géotextile est déterminée par sa force axiale:

Où E est le module de Young du géotextile. L’intégration est réalisée au moyen de la formule du (19).
La tension dans le granulat n’importe qu’au point de contact avec les roues et sur les bords. Entre les deux, la déformation ne sert qu’à transmettre la friction au géotextile. Selon la théorie contrainte-déformation, la déformation du granulat dépend de la contrainte horizontale ainsi que de la contrainte verticale, pondérées par le ratio de Poisson ν. Si l’on définit que l’élongation est positive, la déformation horizontale dans le granulat devient:

σv est la contrainte verticale moyenne.
Sur les bords, la force axiale dans le géotextile disparaît. Par implication, la déformation dans le granulat disparaît. Il résulte donc de la formule (22), qu’un bon choix pour N0 serait:

Pour l’état plastique sous les roues, nous appliquerons la formule d’élasticité (22) avec des valeurs de rigidité réduites. Comme l’état de contrainte est constant, l’élongation peut être exprimée directement par la formule:

Comme Δu est lié à E, la rigidité requise pour le granulat est connue. Il s’agit d’une fraction de la valeur d’élasticité qui est elle-même déterminée par le niveau de plasticité.
Comportement plastique du granulat
Les paragraphes qui précèdent présentent un instrument pour la conception du géotextile. L’influence du sol est caractérisée par certains paramètres mécaniques. Il convient de s’arrêter un instant sur le comportement d’un de ceux-ci: le module de cisaillement du granulat. Ce module dépend de la contrainte isotrope et de la contrainte déviatoire.
Le module de cisaillement est proportionnel à une puissance de la contrainte isotrope. Des expériences ont montré que cette puissance pour les granulats se situe autour de 0,5, Valstad et Strøm (1976). Cet effet n’est pas pris en compte dans le calcul, mais il peut être assez correctement incorporé en utilisant comme référence la contrainte isotrope ½ ( Nm + σH ) au point de déflection maximale.
Le module de cisaillement dépend aussi de la contrainte déviatoire normalisée ou de la friction mobilisée, définie dans la Fig. 3. La pente de la courbe est directement liée au module de cisaillement. En vue d’intégrer ce comportement dans la conception, on peut appliquer le module sécant de la courbe. L’on peut donc spécifier le module de cisaillement suivant:

g(θ) est le module sécant dans la Fig. 3; pt est la contrainte isotrope durant le test; β est un coefficient non linéaire, vraisemblablement égal à 0,5. Gt est la valeur de la rigidité élastique.
En introduisant le concept de friction mobilisée, on peut traiter le comportement du sol comme un comportement élastoplastique. L’approche locale (point de déflection maximum) de la force de Coulomb a pour effet que le granulat tend à bouger latéralement. Le géotextile réagit alors par contrainte latérale plutôt que par action de membrane pour assurer l’équilibre et ce, au prix de déplacements modérés. Le modèle dérivé gère cet aspect en tablant sur des valeurs minimales. Il n’y a qu’au point de déflection maximum que le granulat agit plus faiblement. Il est plus rigide ailleurs. C’est pourquoi l’élongation du granulat est sous-estimée, ce qui engendre une situation nécessitant des géotextiles plus rigides. C’est une sécurité supplémentaire. Ce point pourrait faire l’objet d’une étude future.
Evaluation
Le modèle est près pour être utilisé. Il est utile de mettre les résultats de (10), (15), (17), (19), (21), (22) et (24):

L’on commence par déterminer la force normale. Les deux expressions sont dérivées. Celle du haut est normative, étant donné que celle du bas n’implique aucune restriction. Ce point devra être vérifié. Dans la plupart des cas, la valeur du bas est supérieure à celle du haut. C’est largement suffisant.
Ensuite, l’on adapte la largeur active depuis le bord. La force de traction est déterminée, ce qui permet d’adapter la largeur active au milieu de la route. Enfin, on fixe la rigidité requise du géotextile, ainsi que la rigidité adaptée du granulat. La capacité portante est caractérisée par la loi de Brinch Hansen:

La formule indique la relation entre la charge par roue et la tension provoquée par le trafic.
Références
Semmmeijer, J.B., 1990, “Design of Geotextile Reinforced Paved Roads and Parking Areas”, Proceedings of the Fourth International Conference on Geotextiles, Geomembranes and Related Products, Balkema, Vol. 1, The Hague, The Netherlands, pp.177-182.
Valstad, T. and Strøm, E. , “Investigations of the Mechanical Properties of Rockfill for the Svartevann Dam, using Triaxial, Oedometer and Plate Bearing Tests”, Norges Geotek. Inst. , Publ. 110, pp 3-8.